About me
I am a Robot Learning Engineer passionate about enabling generalizable dexterous manipulation across diverse tasks, natural language instructions and humanoid robot embodiments (arms/hands).
Over more than five years across research labs and industry, including TUM, Agile Robots and RICAIP, I have trained and deployed deep learning models for robotic manipulation on real robotic hardware. I currently work as an AI Engineer in robot learning at a stealth-mode robotics startup in Munich. For a full overview of my professional experience, see my LinkedIn profile.
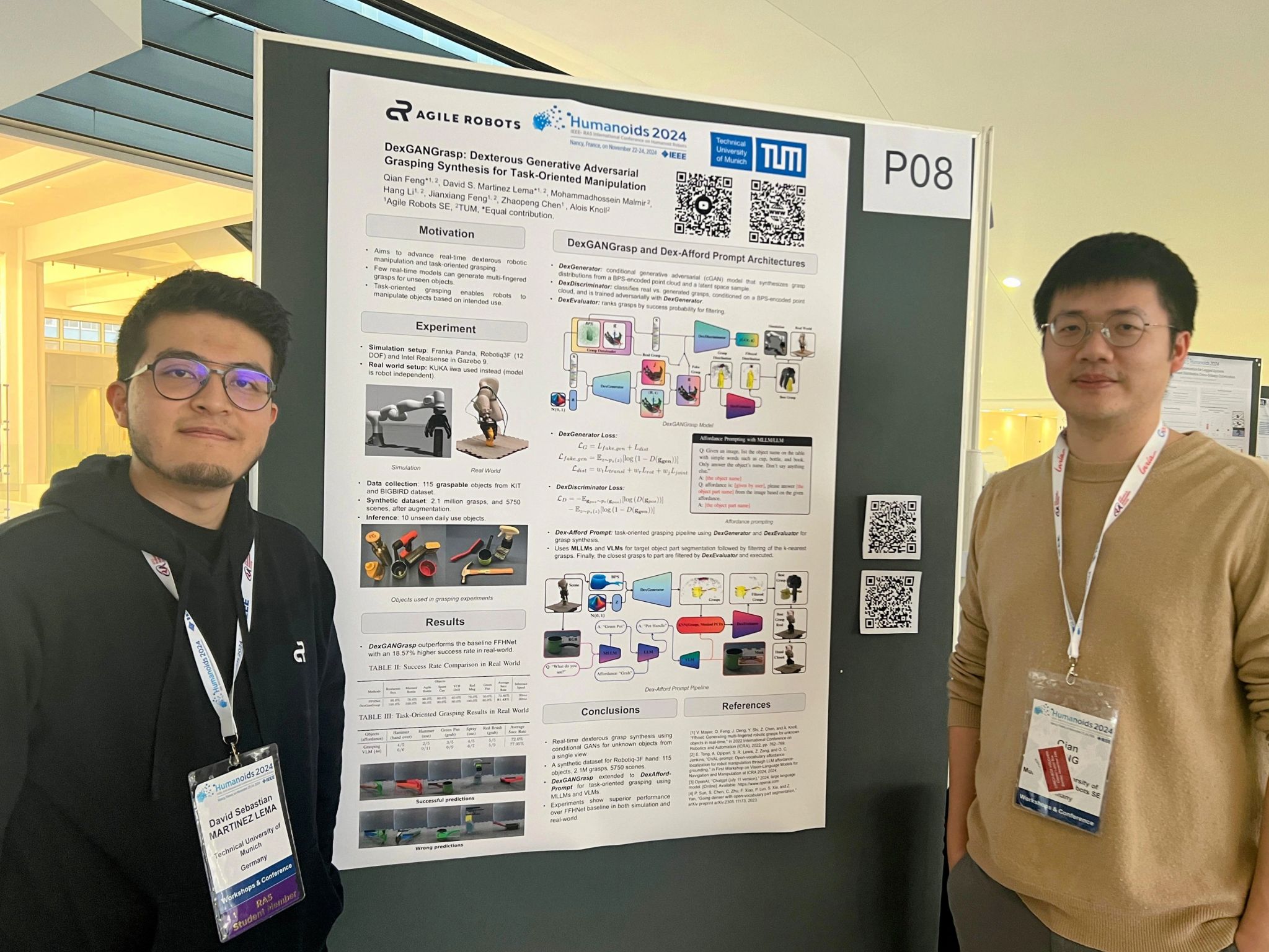
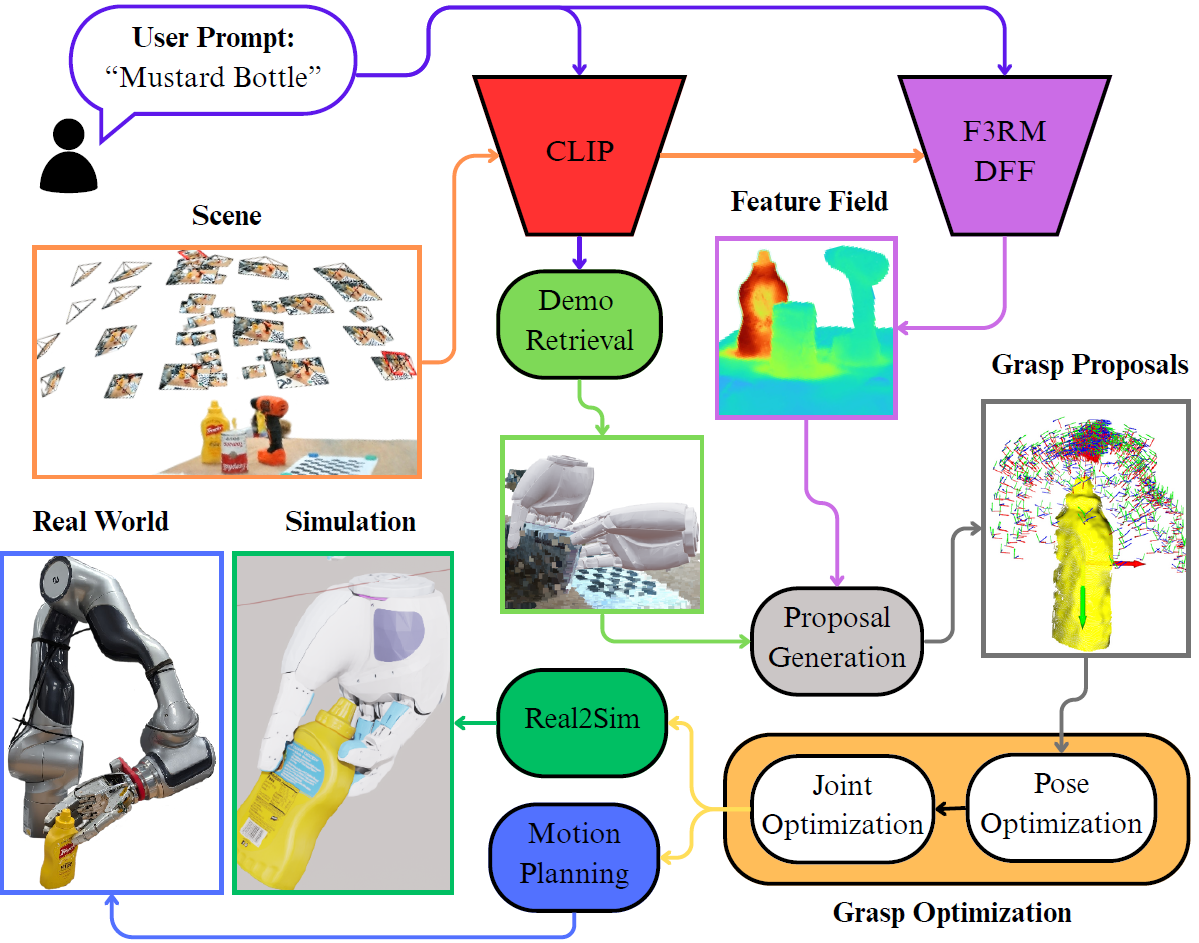
Previously, I studied the Elite Master of Science program in Neural Engineering at the School of Computation, Information and Technology of the Technical University of Munich (TUM) where I was mentored by Prof. Gordon Cheng. My thesis, "Neural Feature Fields for Language-Based Dexterous Robotic Manipulation," focused on language based dexterous grasping and was done at TUM and Agile Robots SE. This work was supervised by Dr. Qian Feng and Prof. Alois C. Knoll, with co-advisorship from Dr. Jianxiang Feng.
What i'm doing
-
Dexterous Manipulation
Combining visual, tactile, proprioceptive and semantic understanding of the real world with Deep Learning to enable generalizable dexterous grasping across humanoid robot embodiments, guided by natural language instructions.
-
Robot Learning & Foundation Models
Deep foundation models for generative robotic grasping, VLM based manipulation, deep reinforcement learning for in-hand manipulation and VLA models for manipulation.
-
3D Computer Vision & Robot Perception
Object detection, instance segmentation, 3D pose estimation and scene reconstruction, 3D vision-language features for language- and demonstration-driven grasping.
-
Robotic Systems & AI Deployment
Large scale robotic simulators, sim-to-real transfer, teleoperation, robot agent control and AI model deployment.